Computer Vision
Intelligent Orchid Flower Variety Recognition System
The orchid has an enormous number of variety, and the number of variety is continuously increasing as new breed invented. Even an expert may not always be able to correctly recognize the variety of an orchid. This project provided an automation solution to this problem. The features of target flower were extracted and compared with the database, so the system can identify the possible varieties.
Advisor: Ta-Te Lin


Butterfly Species Identification System
Taiwan has more than 370 species of butterfly. The purpose of this project was to provide a tool for amateur observers to identify the butterfly they find in the field. A clear whole wing picture is needed for extracting features. Features such as color statistics, complexity, and geometric statistics were used for identification.
Collaborator: Shin-Fu Wang
Advisors: Ta-Te Lin, Cheng-Jen Shih


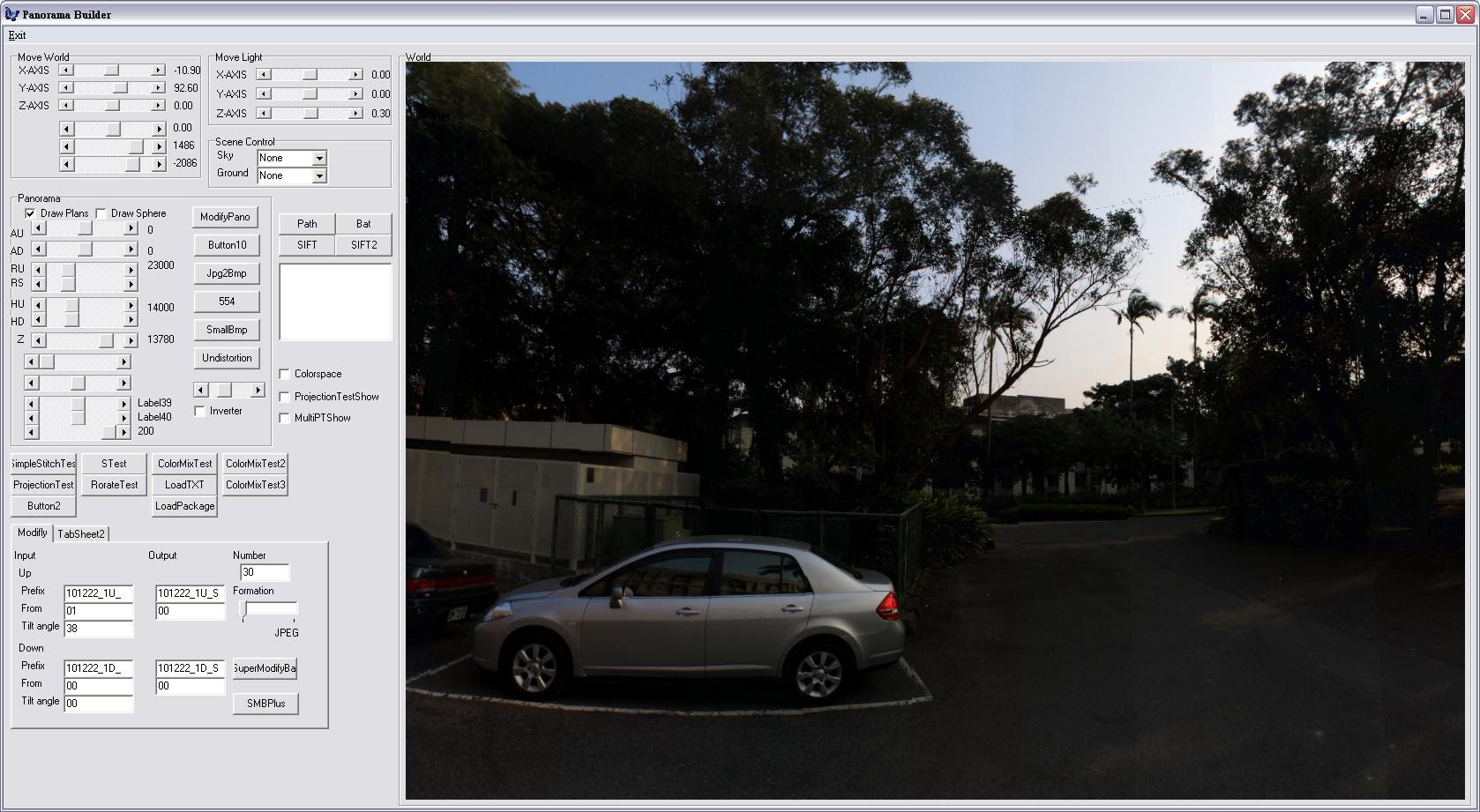
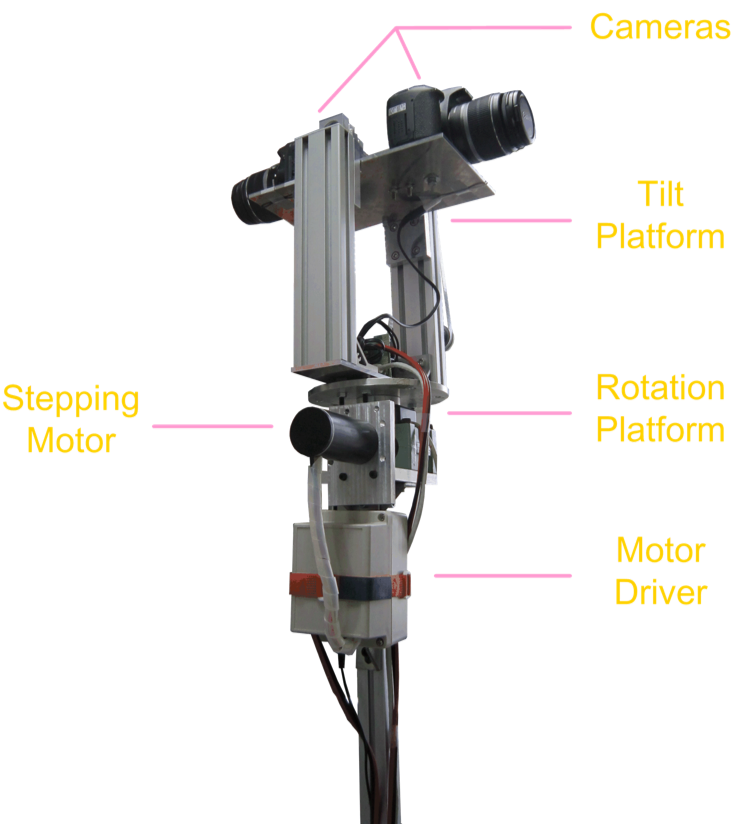
Autonomous Panorama Building System
The panorama image acquisition system was mounted on an autonomous mobile robot. The image acquisition head had two high-resolution cameras, which were driven by step motors to capture the surrounding images on an assigned location. The acquired images were calibrated, stitched, smoothed, and projected onto a panoramic model space. The panorama scenes and the location information, which estimated by the autonomous robot, were integrated into a street view system.
Collaborator: Chia-Hung Hsu
Advisor: Ta-Te Lin




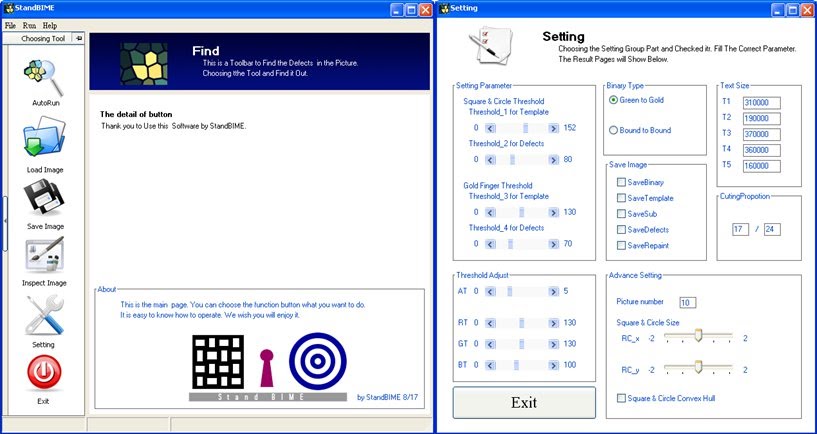
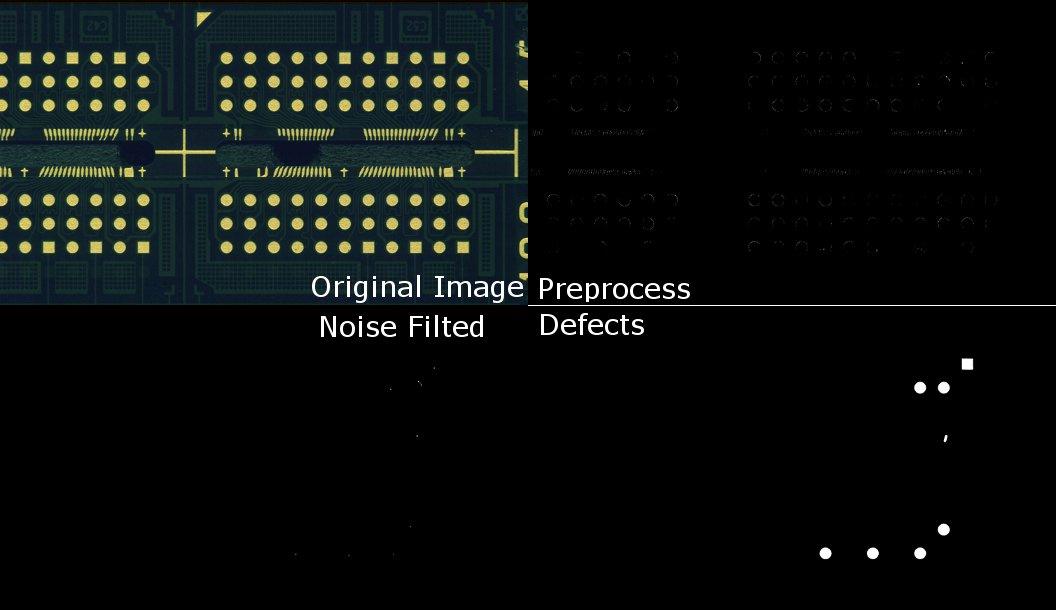
Defect Detection of Circuit Board
This project was for a competition, Utechzone Machine Vision Prize (UTMVP). UTMVP is an annual machine vision competition, in which China and Taiwan participants are the major contributors. The goal of this competition was to detect defects on printed circuit board.
The threshold of the defects were subtle. It depended on depth, shape, size, and position of a defect. The team I led developed an adaptive color threshold method and a morphological methods to screen the possible defects.
Collaborators: Shih-Chi Chou, Lun-Cheng Chu, Chih-Hein Chen, Yu-Che Cheng
Advisor: Ta-Te Lin


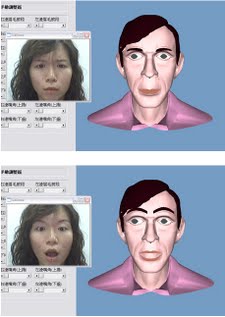
Interactive 3D Facial Expression Simulation
This project was based on computer graphics and machine vision. The built 3D human face model can simulate facial expressions that appear on the system operator's face. The simulation can be exported as a video profile. Through the well integration of machine vision and feature point tracking, users can interact with the program easily. Therefore, this function can be implemented into software for disabled people to make them operate various machines easily.
Collaborator: Wan-Lin Hu
Advisor: Ta-Te Lin