Robotics
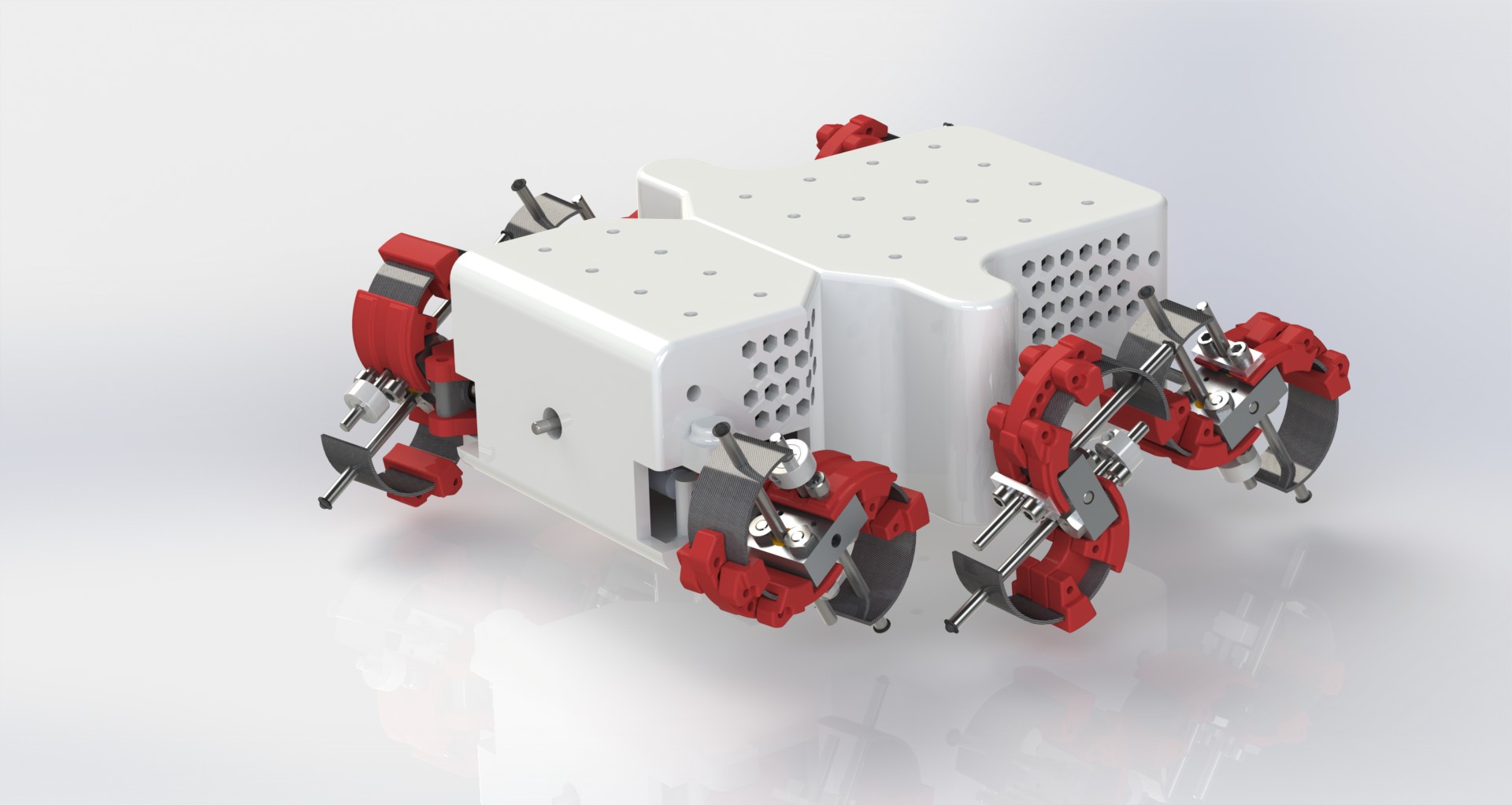
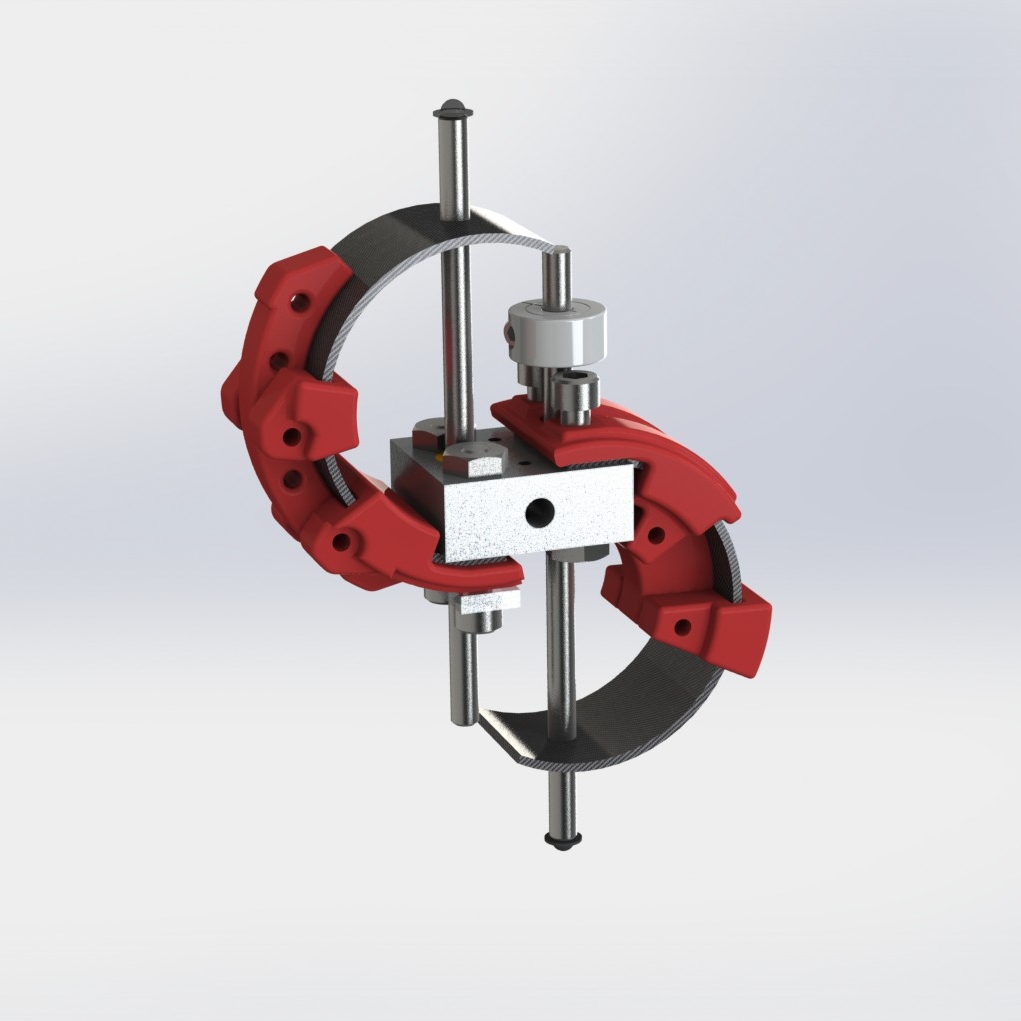
Leg Stiffness Optimization for Locomotion: from Animal to Robot
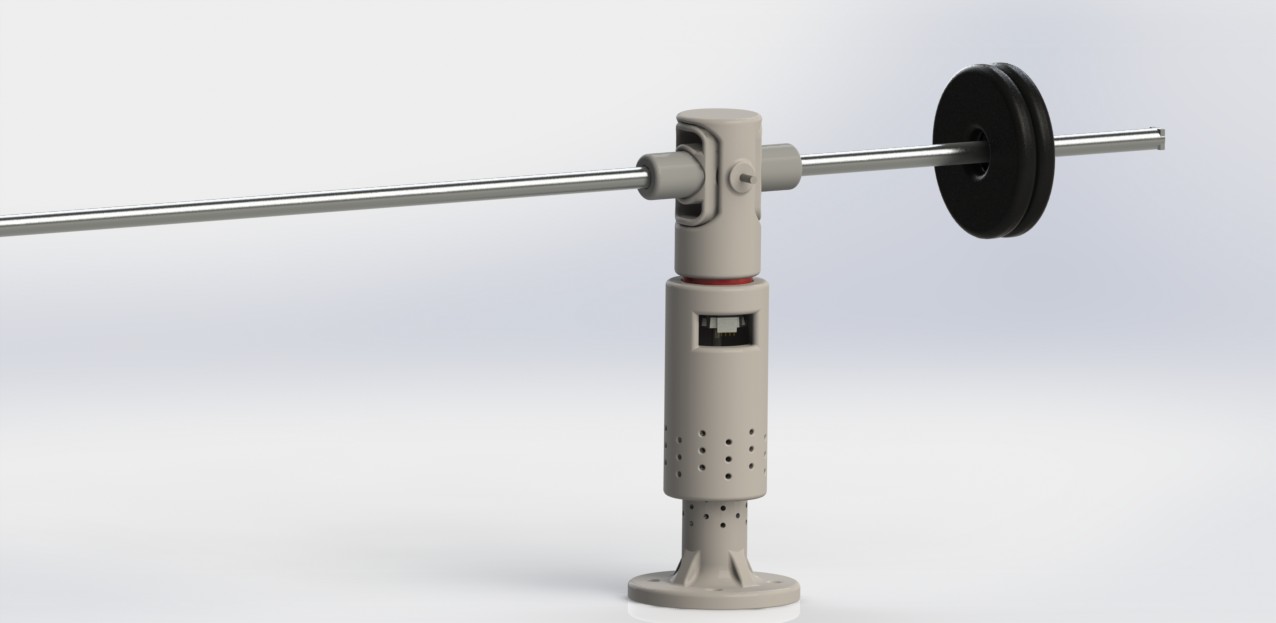
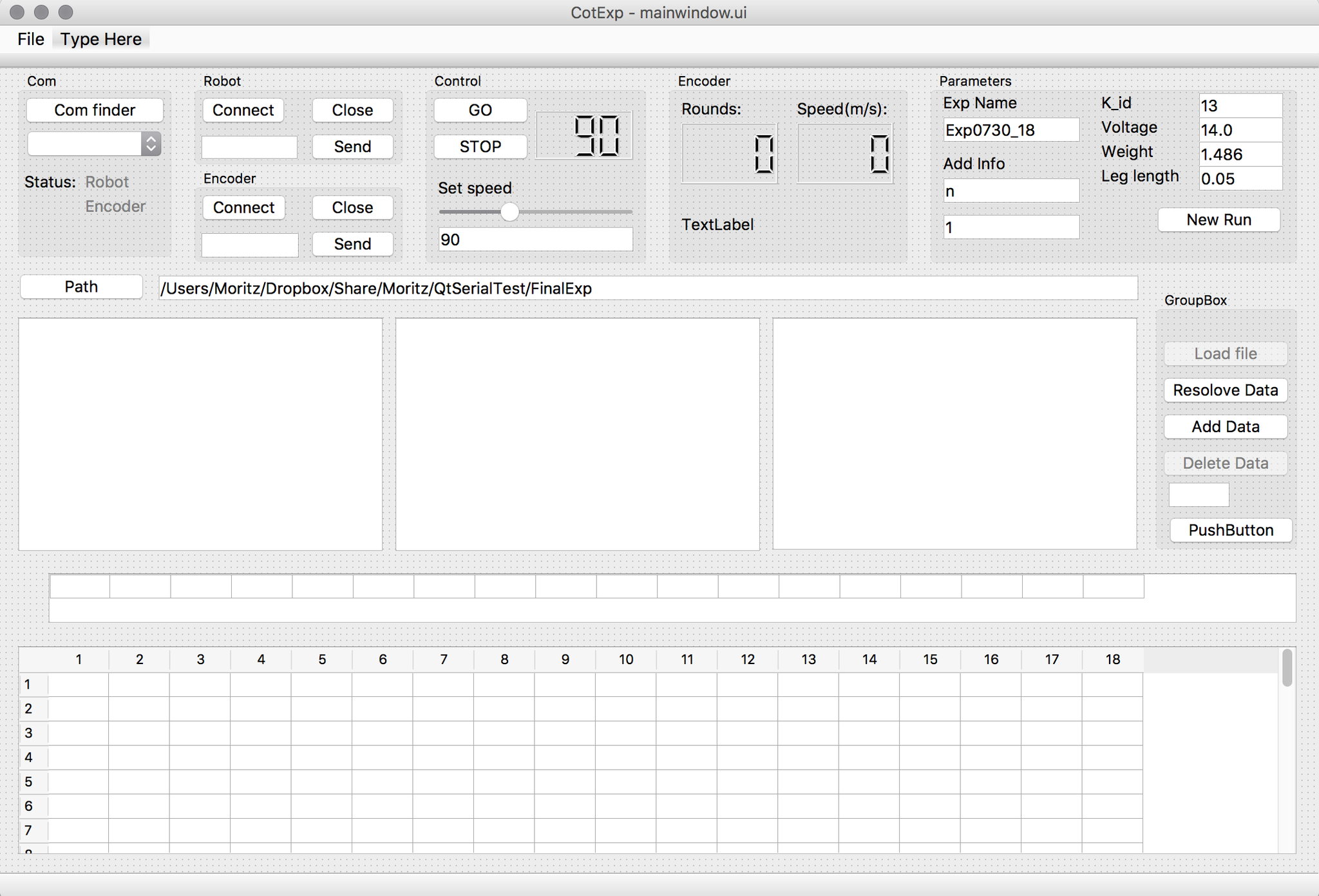
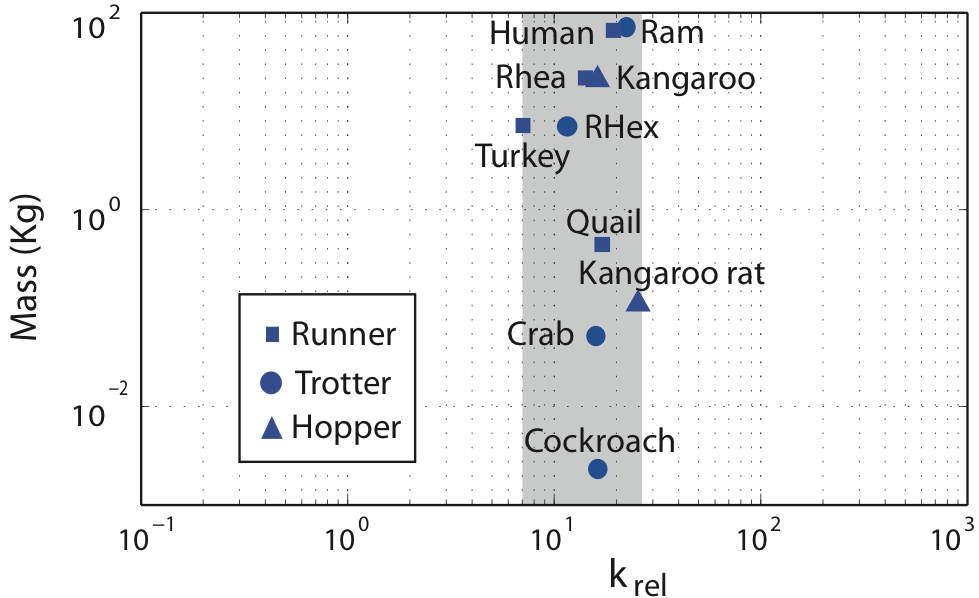
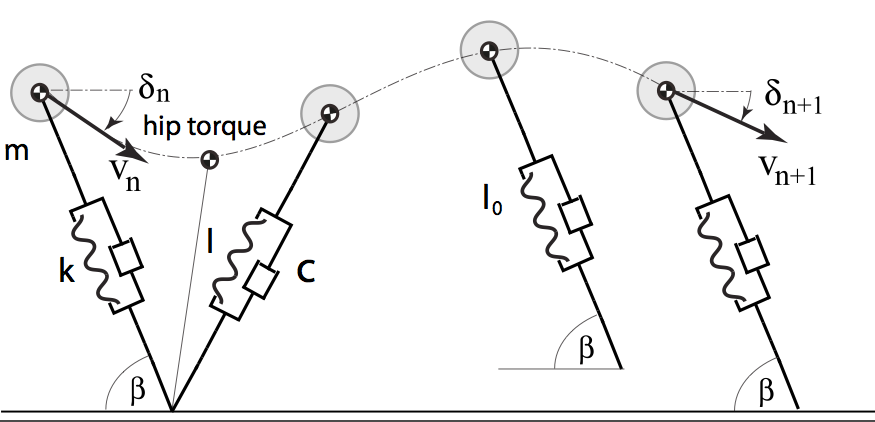
No matter the size, weight, or leg numbers, the relative leg stiffness from different animals are all in a small range. It implies that there is an optimal relative leg stiffness for all animals. This project built a robot to test the optimal relative leg stiffness theorem for man-made machines. The robot was equipped with adjustable stiffness legs. We monitored the input energy and measured the output speed under different stiffness legs to verify the theorem. The result suggested a optimal leg stiffness for robot.
Collaborator: Zhuohua Shen
Advisor: Justin Seipel
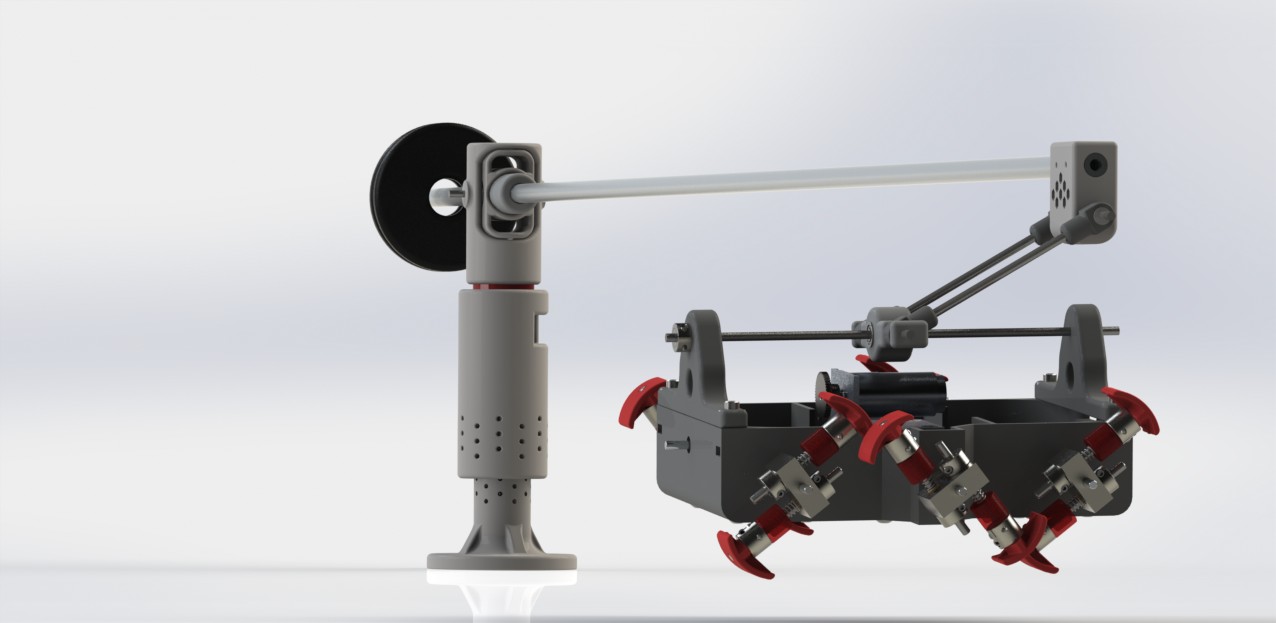







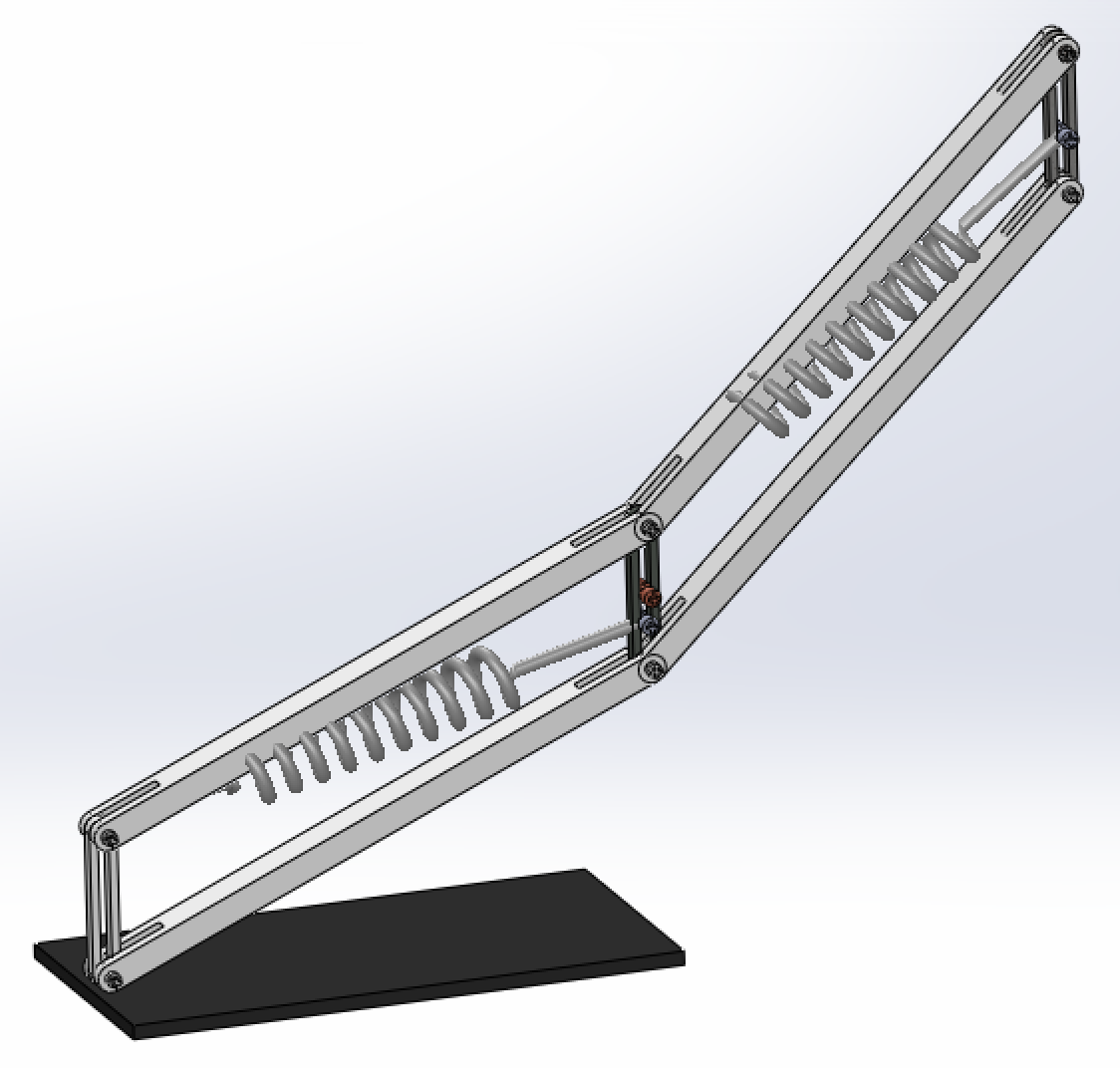
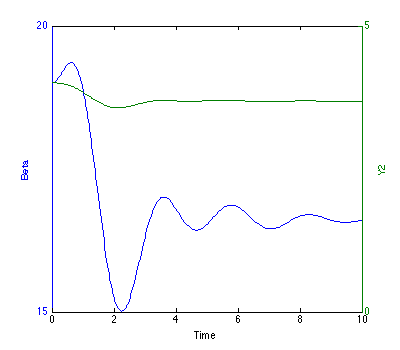
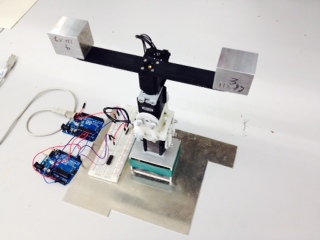
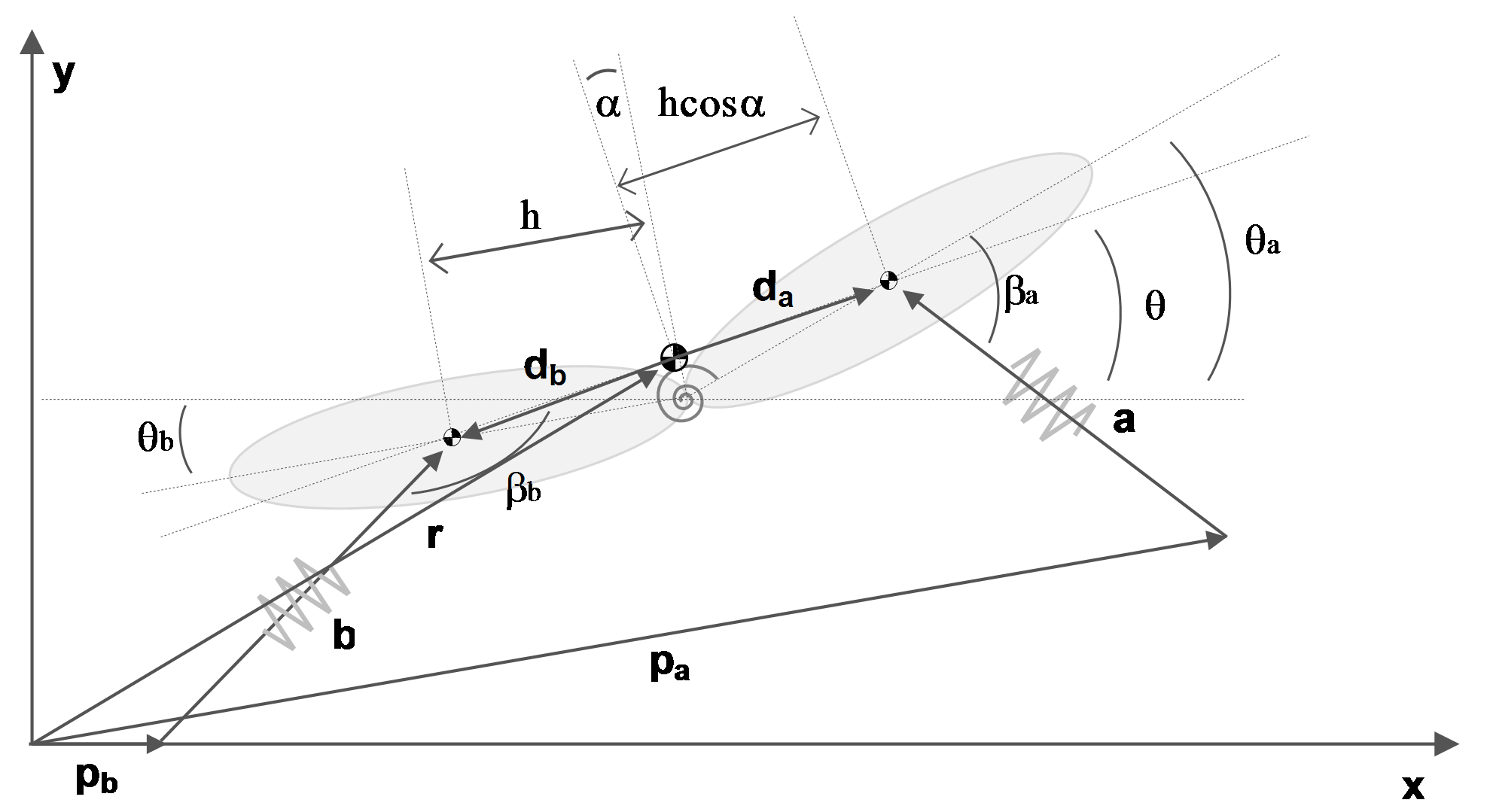
Simulation of a Suspended Load Arm Mechanism
A suspended load arm is a unique mechanism, which has been applied to stabilizer or shock absorber. This project simulated the mechanism analytically and numerically, to explore the relationships between the spring stiffness, loading mass, and spring attached position.
Collaborator: Jeffery Ackerman
Advisor: Justin Seipel


Back Bending Driven Locomotion Robot—Two legs
Some studies suggested that the human spine motion actively provide power to locomotion, while other studies disagreed with that. Based on our spine engine study, we built a small robot with a back. It can simulate the human spine motion during walking and running. The result showed that the robot can "walk" with only the upper body motion.
Advisor: Justin Seipel





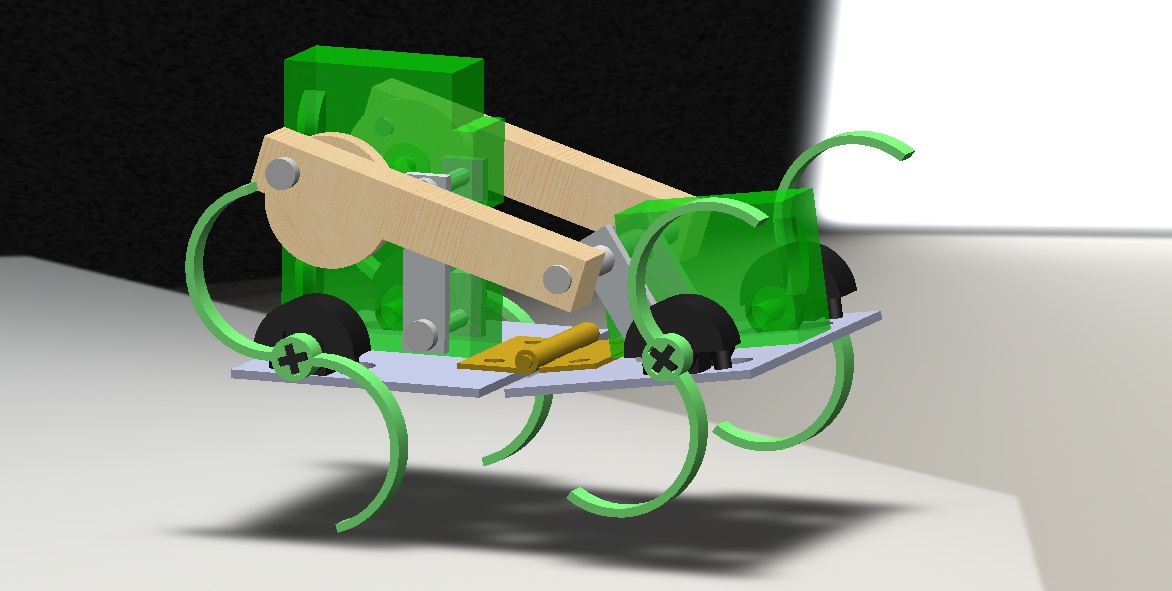
Back Bending Driven Locomotion Robot—Four legs
For a four-leg animal like cheetah, back motion provides addition power and extends the gait length to help it run. In this project, we used a small toy robot to examine the efficiency of running with and without active back motion. We had also tested the effects of passive elements such as tendons and ligaments on energy efficiency by applying springs to the robot back.
Advisor: Justin Seipel


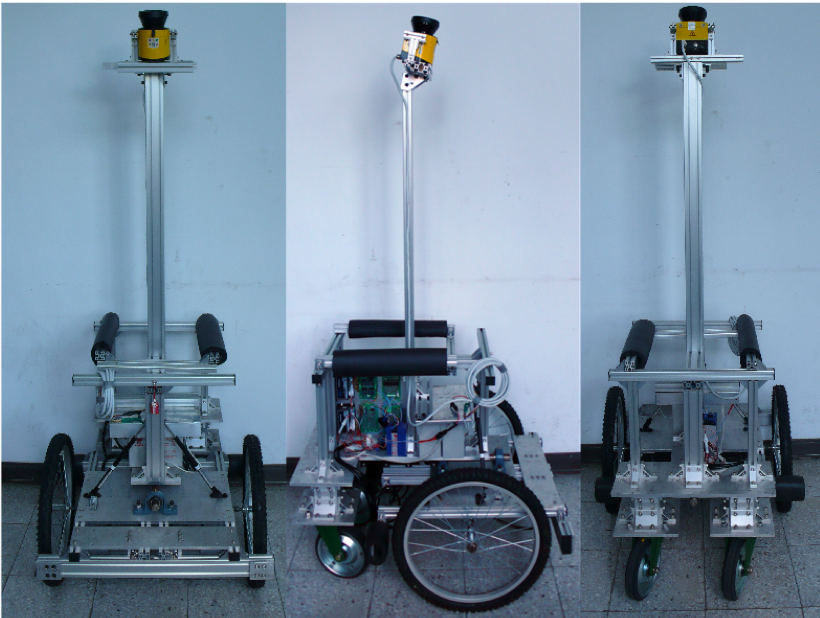
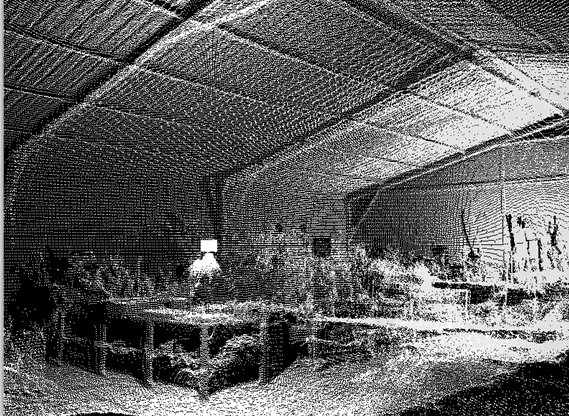
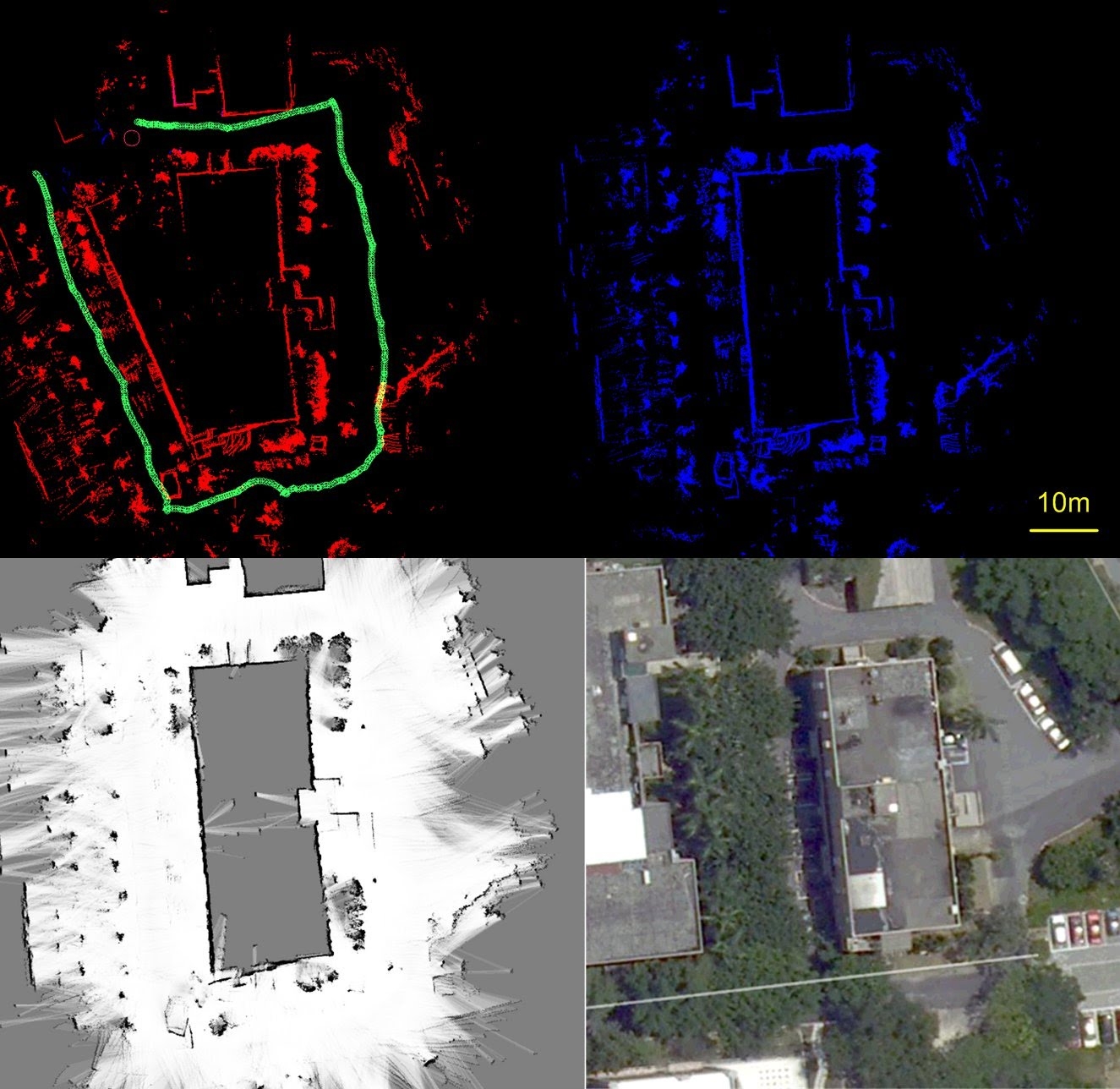
An Improved SLAM Algorithm for Field Robots
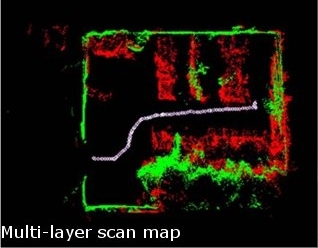
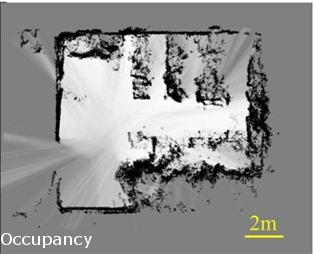
This project proposed an improved simultaneous localization and mapping (SLAM) algorithm for a field robot. The field robot I built from scratch can adapt to a tough environment and navigate itself in the yard with SLAM. The established algorithm and robot can overcome the disturbance in a field (i.e., agricultural environment) and build a reliable environmental map.
The tilted laser range finder mounted on the top was the main sensor for detecting the environment. The laser sensing data were divided into multiple layers; each layer performed the SLAM procedure separately. A supervised sensor fusion algorithm was used to combine the information from the sensors and layers. While the robot moves, the tilt laser range finder can obtain 3D information from its 2D sensor.
Advisor: Ta-Te Lin







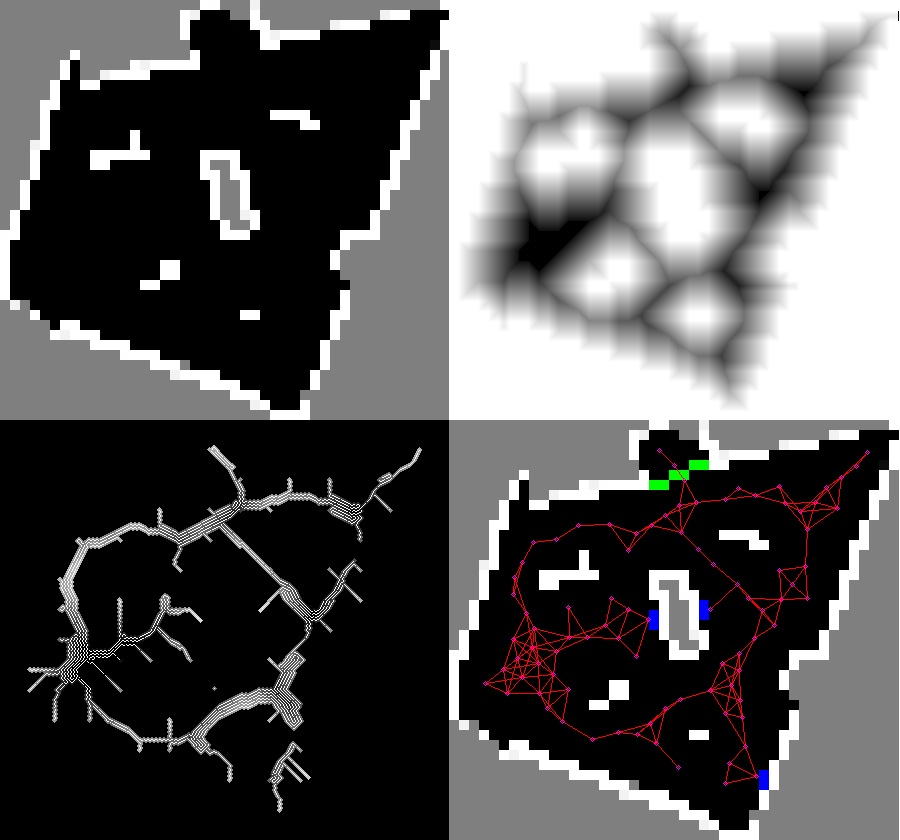
Treasure Finder Robot
A fun course project to make a robot search a treasure in an assigned filed. This project included three parts. First, the robot localized itself with a given map. Second, the robot planned and executed a route to explore the map area. Last, the robot found the visual target, the treasure.
The robot located itself by matching the surrounding geological features with the laser scans. The robot had to go to several check points to search for the treasure. We defined the movable areas in the map and transferred the map from a geometry map into a routes-nodes map, and solved a shortest path to visit all check points. The treasure was an object marked with an assigned figure. We used camera on the robot to match the captured image with a pre-built image sets.
Collaborators: Chih-Fu Lin, Shun-Chieh Hung, Chun-Ta Lu, Po-Yi Hsu
Advisor: Chieh-Chih (Bob) Wang





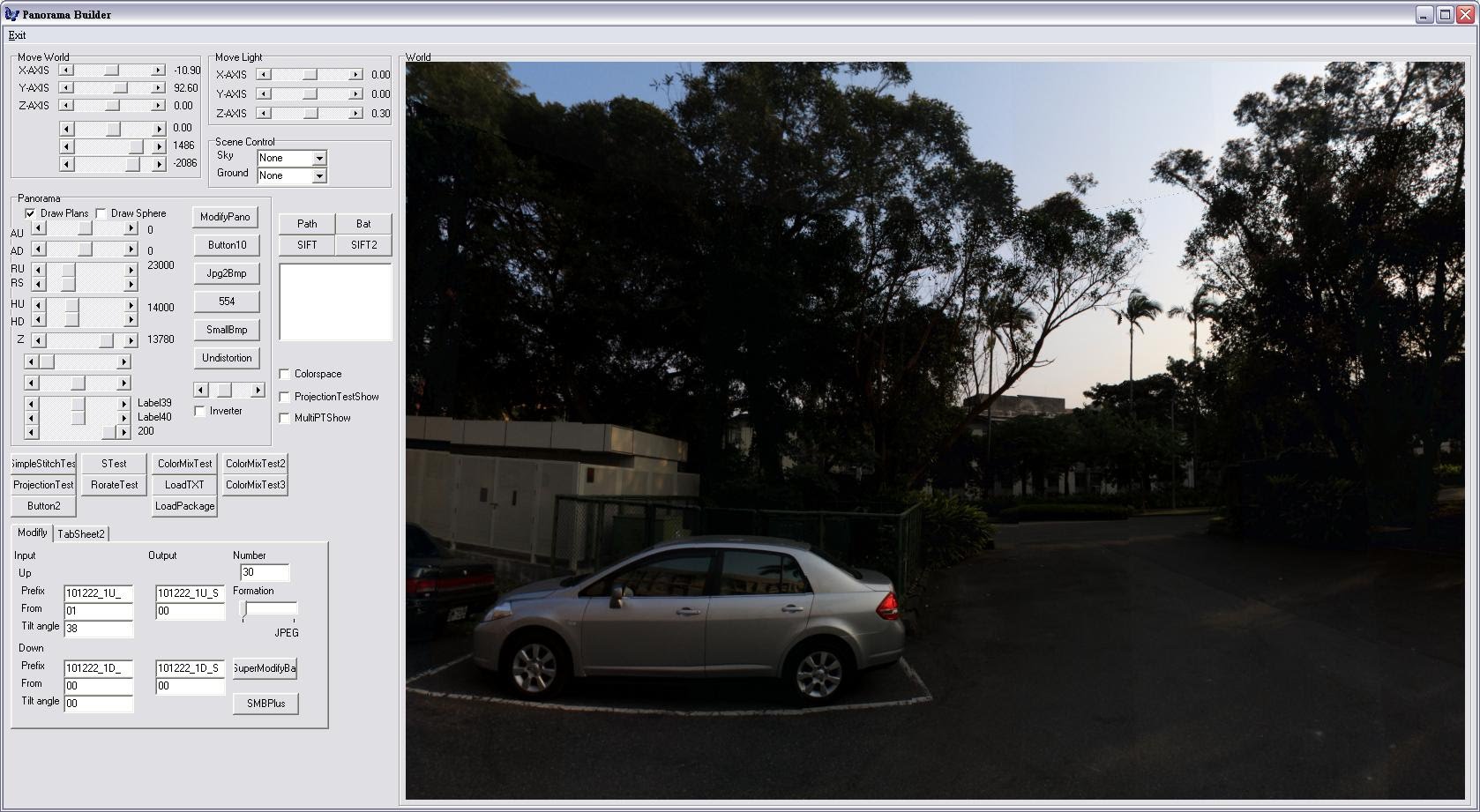
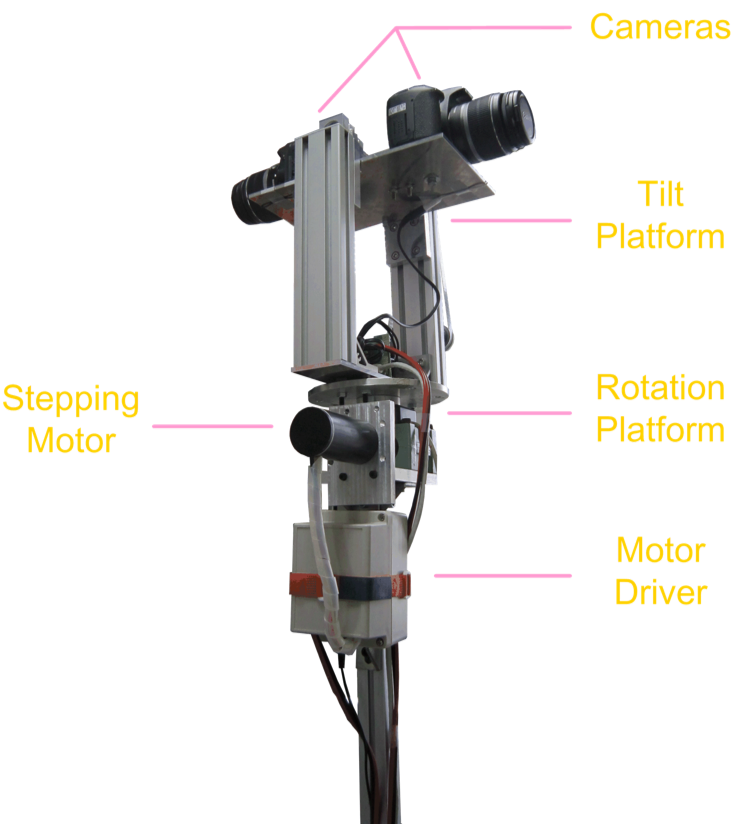
Autonomous Panorama Building System
The panorama image acquisition system was mounted on an autonomous mobile robot. The image acquisition head had two high-resolution cameras, which were driven by step motors to capture the surrounding images on an assigned location. The acquired images were calibrated, stitched, smoothed, and projected onto a panoramic model space. The panorama scenes and the location information, which estimated by the autonomous robot, were integrated into a street view system.
Collaborator: Chia-Hung Hsu
Advisor: Ta-Te Lin




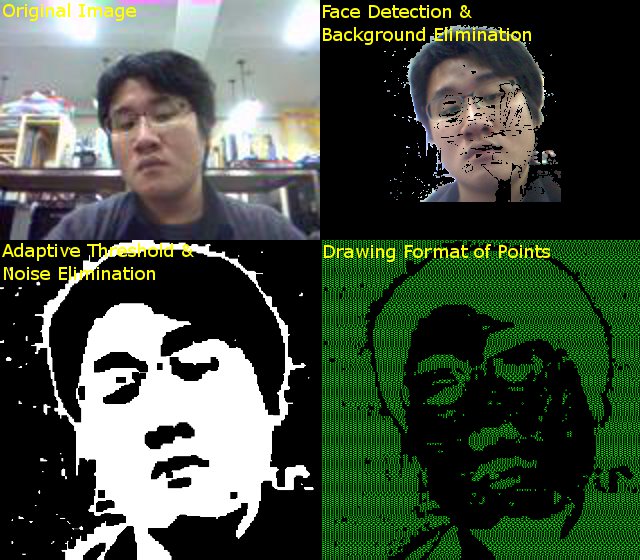
Sketch Robot
A small course project of computer-human interaction system. The system was built with a laptop, a micro-controller (89S51), and a home made two-axis robot arm. We used the laptop's camera to capture a face photo of a subject and processed the photo into a series of sketch paths. The robot arm then sketched the processed face on a paper.
Collaborators: Chia-Hung Hsu, Chang-Chih Liu
Advisor: Li-Chen Fu



Autonomous Patrol Robot Based on Stereo Vision
A differential drive patrol robot built with laptop and webcams, which was able to navigate itself in an indoor environment and avoid obstacles.
Advisor: Ta-Te Lin
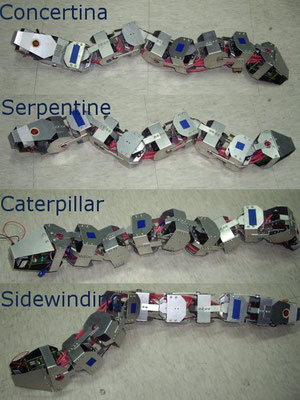
Snake Robot Gait Simulation
A snake-like robot has great potential in rescue and construction. We used 8 servo motors to drive 4 pairs of orthogonal-joints to make a snake robot. Servos were controlled by an embedded microprocessor, Basic Stamp 2, which receives wireless remote control signal through RF. Based on the gait analysis from biologists, we simulated four types of real snake locomotion mode using this robot: concertina, serpentine, caterpillar, and sidewinding. The movement style can be changed during movement to adapt to various tasks and terrains.
Collaborator: Wan-Lin Hu
Adviser: Ta-Te Lin