Human Behavior Modeling
Uncertainty of Wheelchair User Perception and Motion
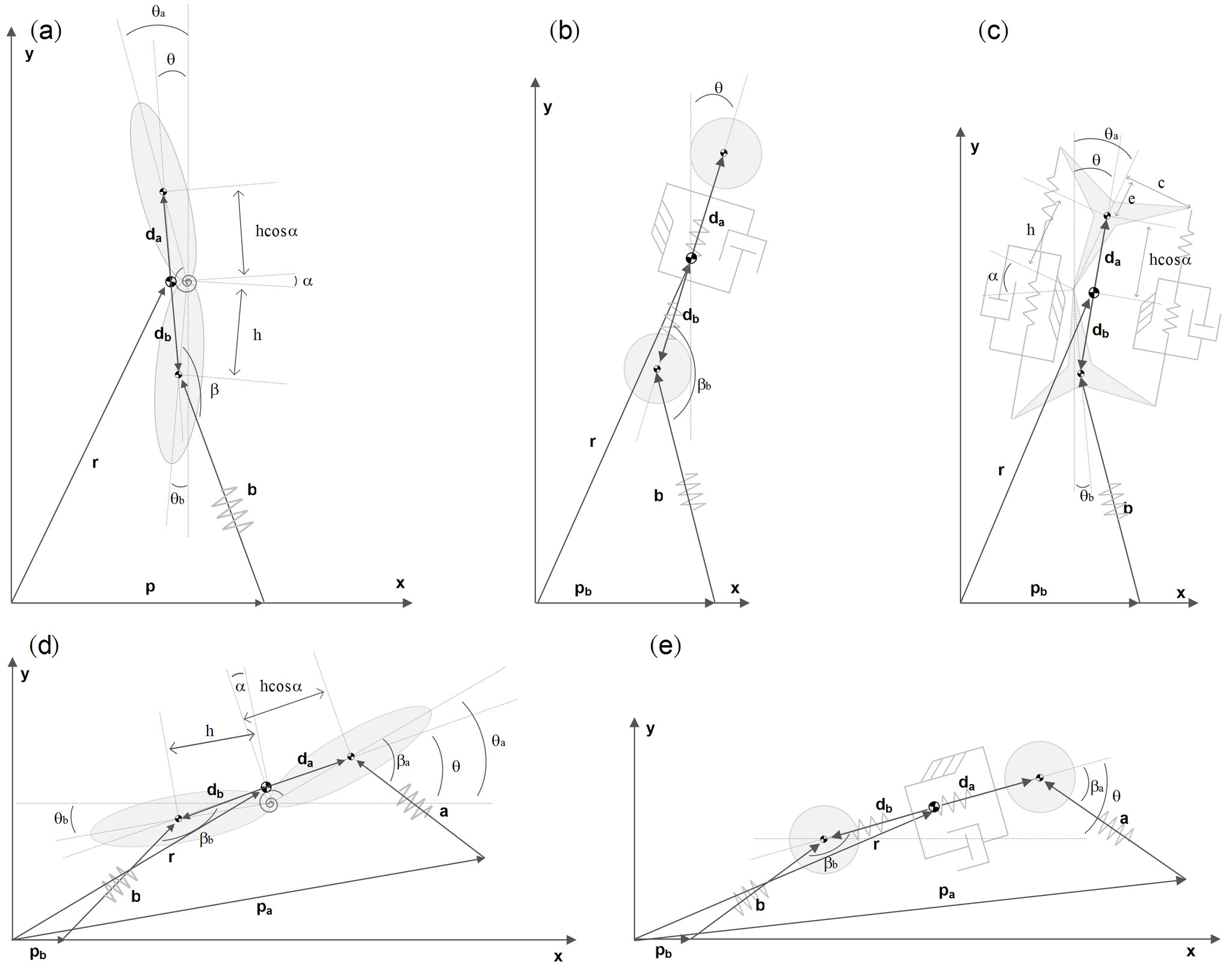
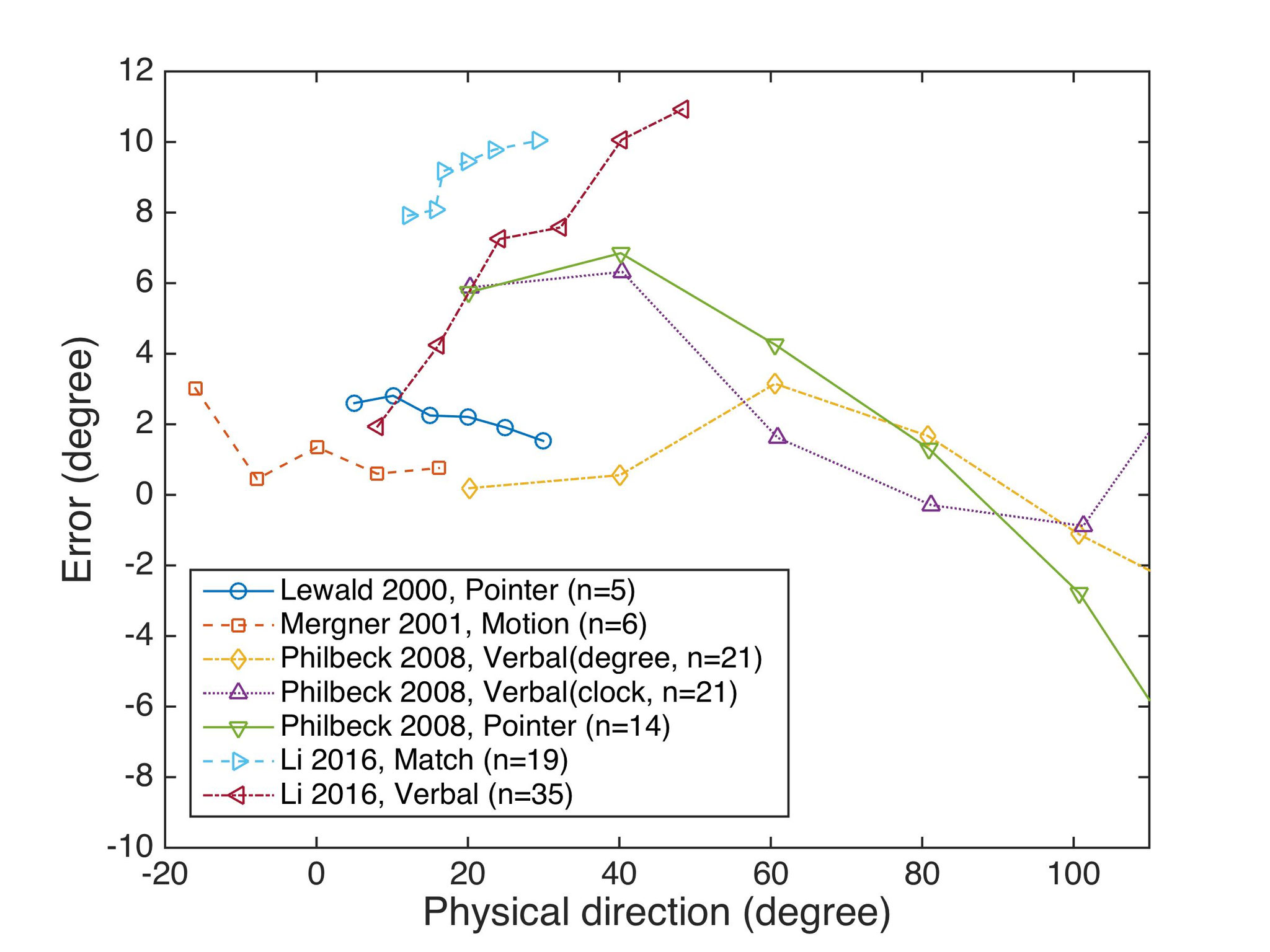
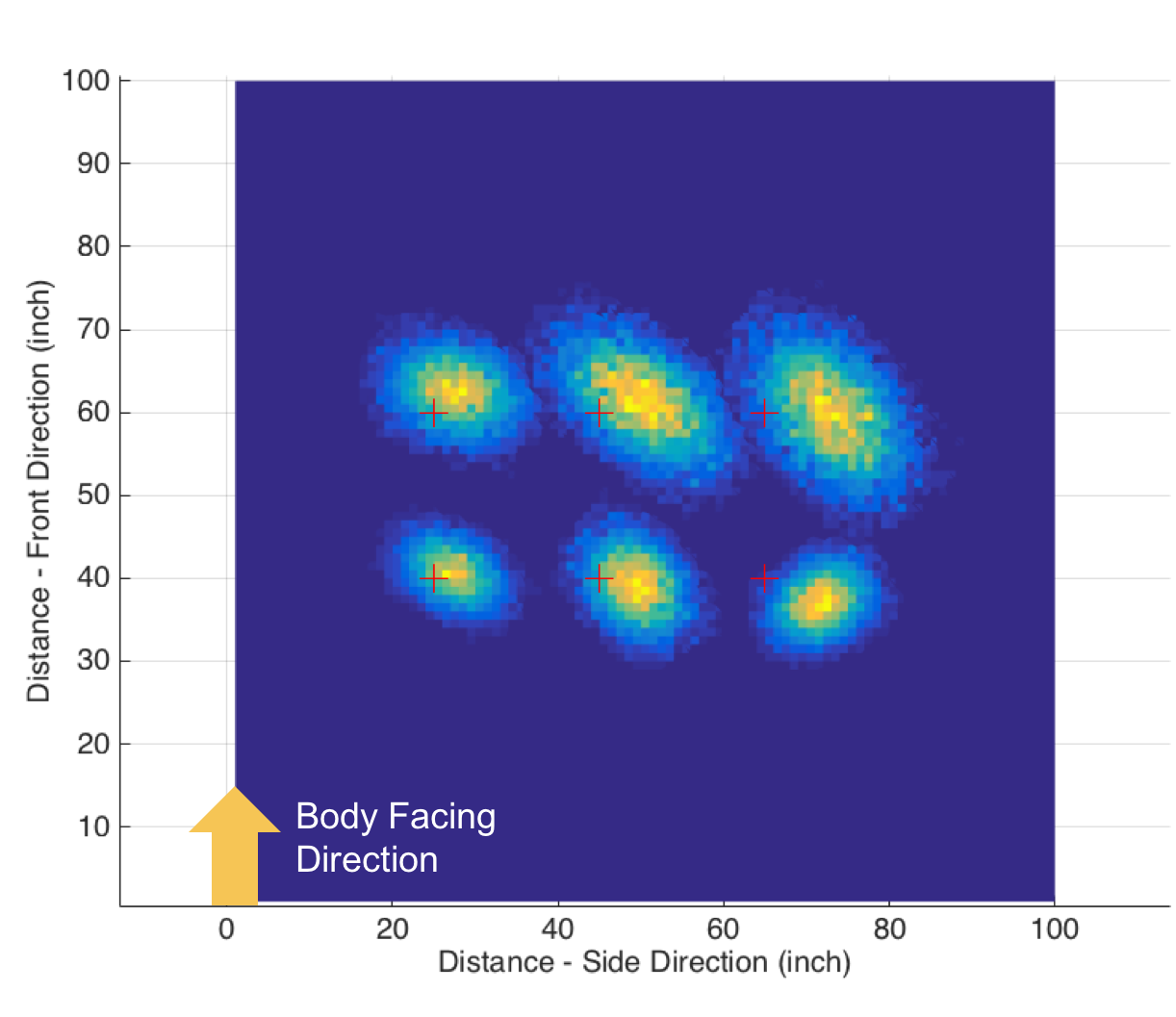
The spatial perception is a very important factor in cognition and perceptual-motor calibration, which is the fundamental of many daily skill, such as walking, picking, throwing, or driving. By applying a hidden Markov framework on the perceptual-motor calibration problem, it provides a path to understand and to predict human uncertain behaviors. However, the uncertainty of human spatial perception and motion were not carefully examined in the existing literature. Therefore, in this study, we conducted several human subject studies to model the general behavior and uncertainty/error of human spatial perception and motion in probabilistic formation. The results of this study became the fundamental of the next project: Locomotion Simulation for Wheelchair Users & Lift Design.
Advisor: Justin Seipel





Locomotion Simulation for Wheelchair Users & Lift Design
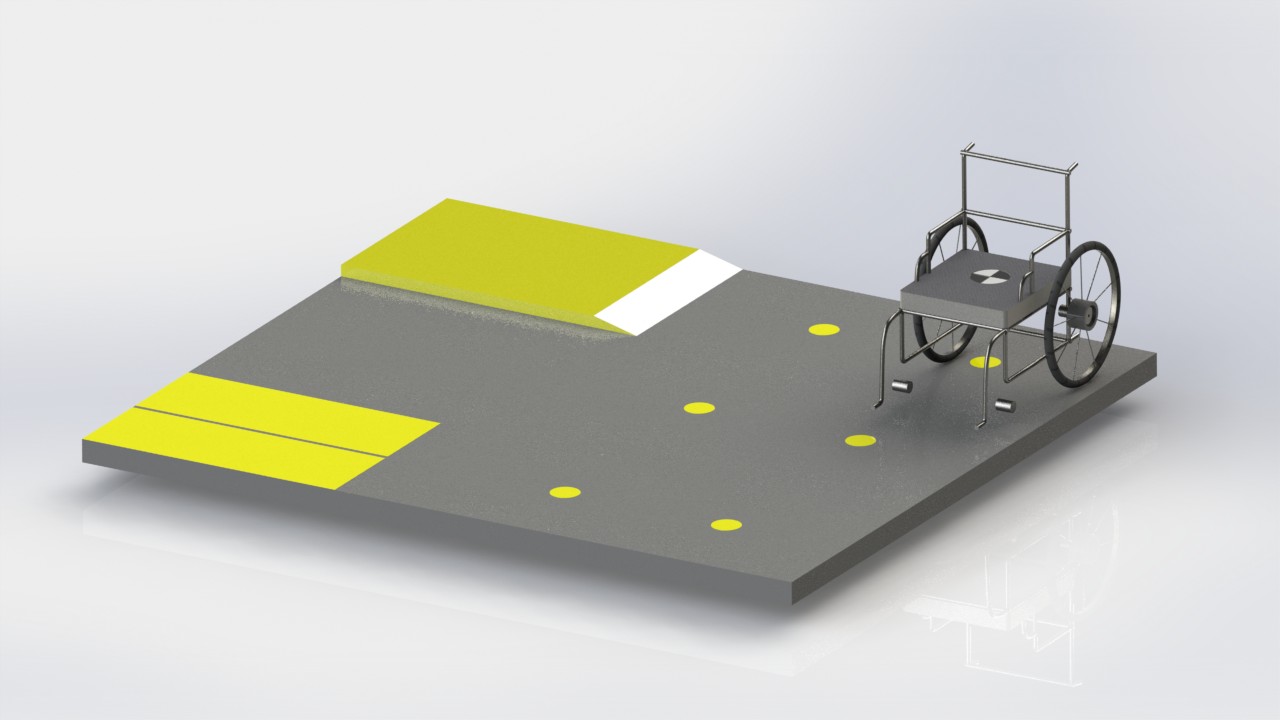
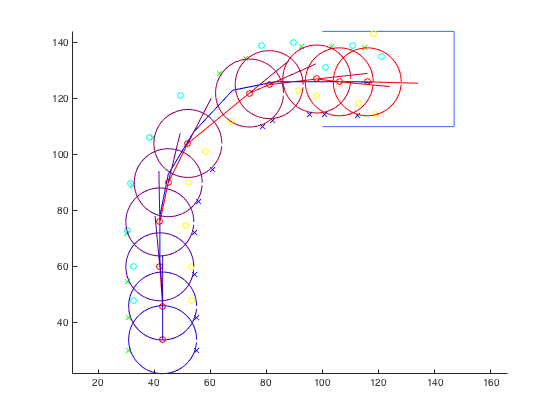
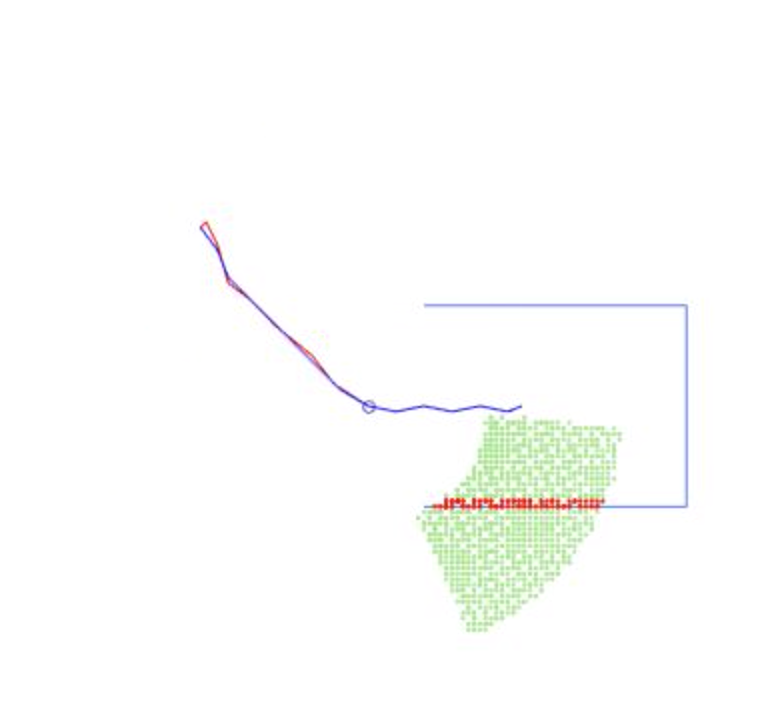
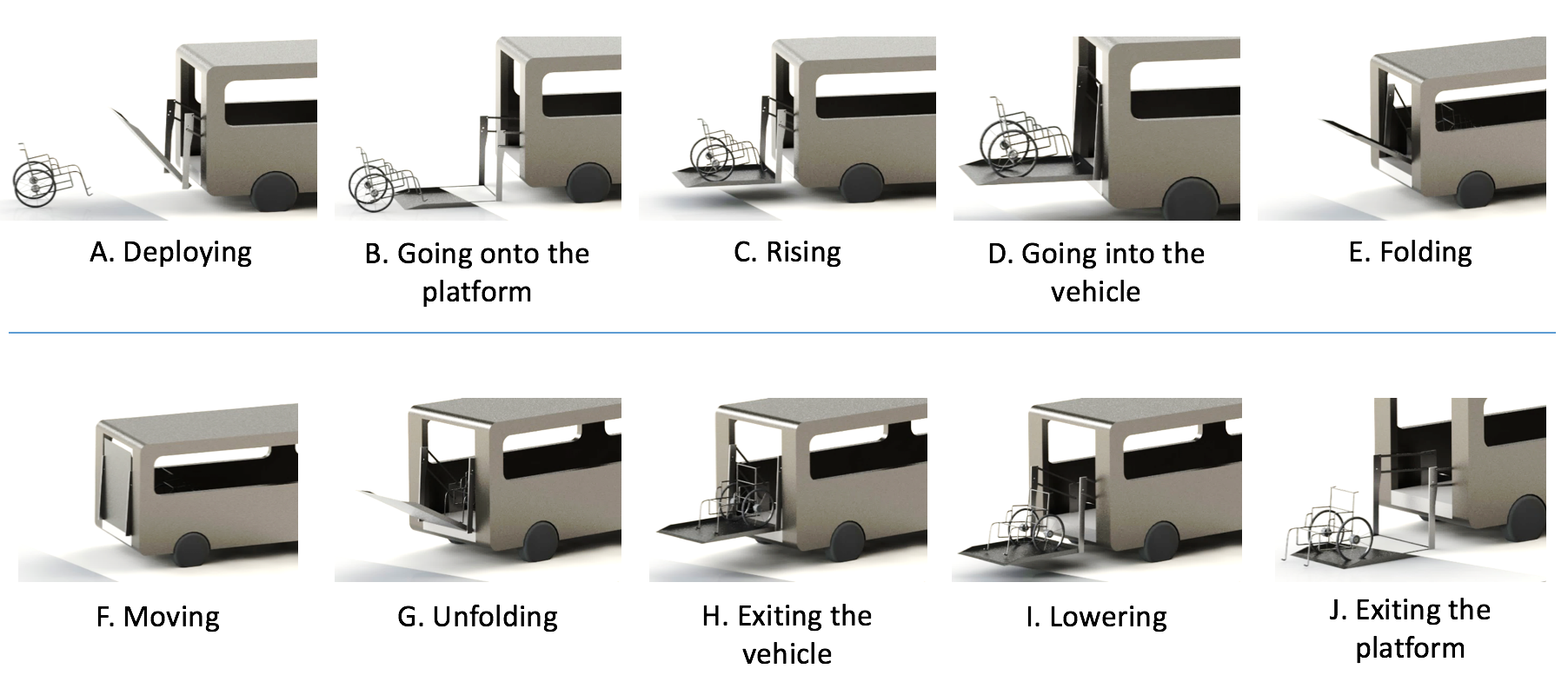
By applying the empirical uncertainty models of human perception and motion to a HMM structure, we built a program to simulate the uncertain behaviors of wheelchair users in the context of lift boarding. The program simulated the process that a wheelchair user observes the environment and finds a path to the safe area on the lift platform. The simulation result was validated with human subject experiment, and was used to optimize the design parameters of a wheelchair lift.
Advisor: Justin Seipel









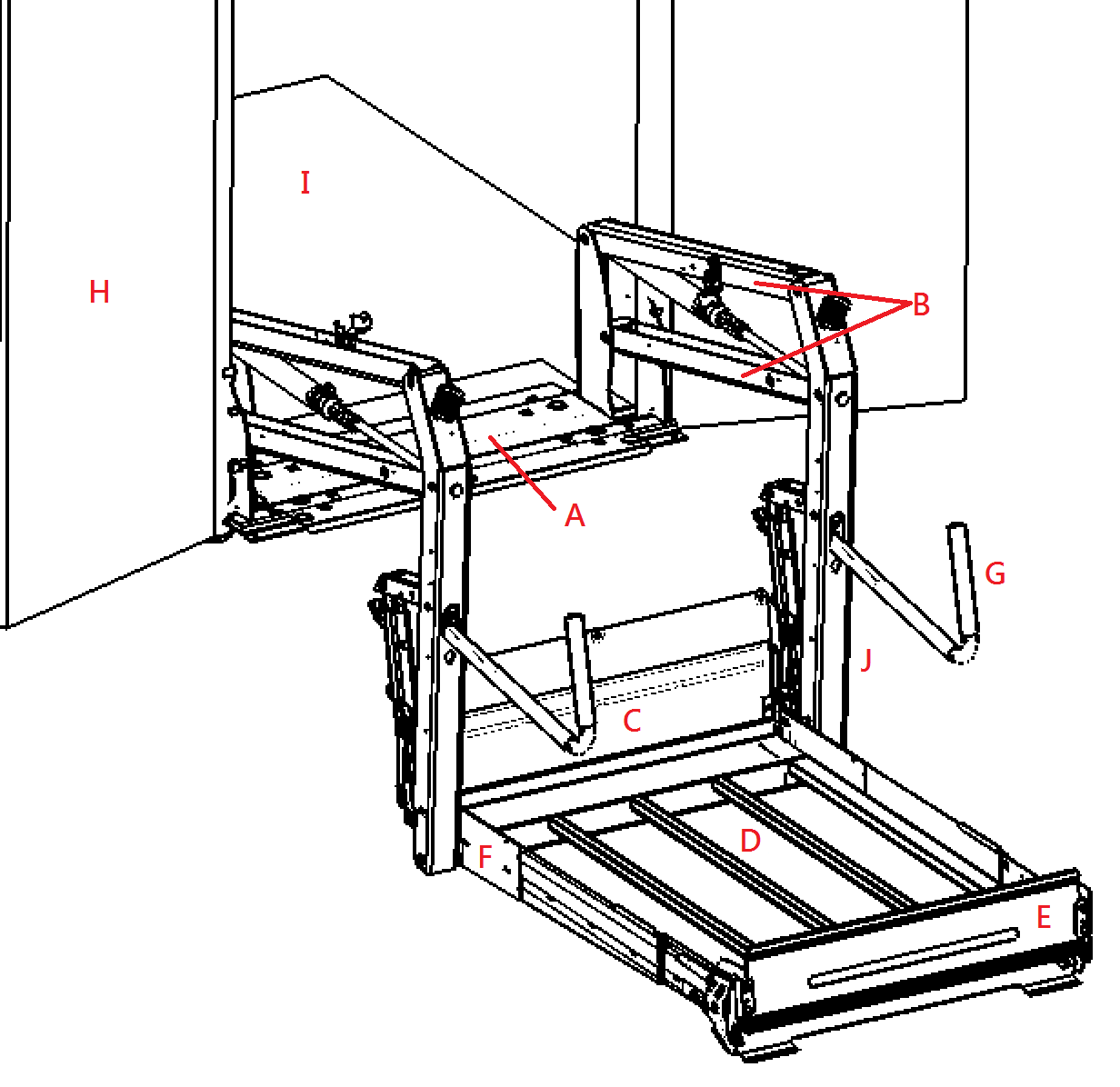
Safety Inspection and Fail Prevention for Wheelchair Vehicle Lift
In this project, we closely cooperated with a wheelchair lift manufacture to carefully examine possible risk factors of using a wheelchair vehicle lift. We analyzed procedural and anatomical safety/risk factors with end-users and service provides, and provided design solutions/guidelines for critical safety and perceptional issues.
Collaborators: Jeffrey Ackerman, Sashank Allu
Advisors: Justin Seipel, Bradley Duerstock




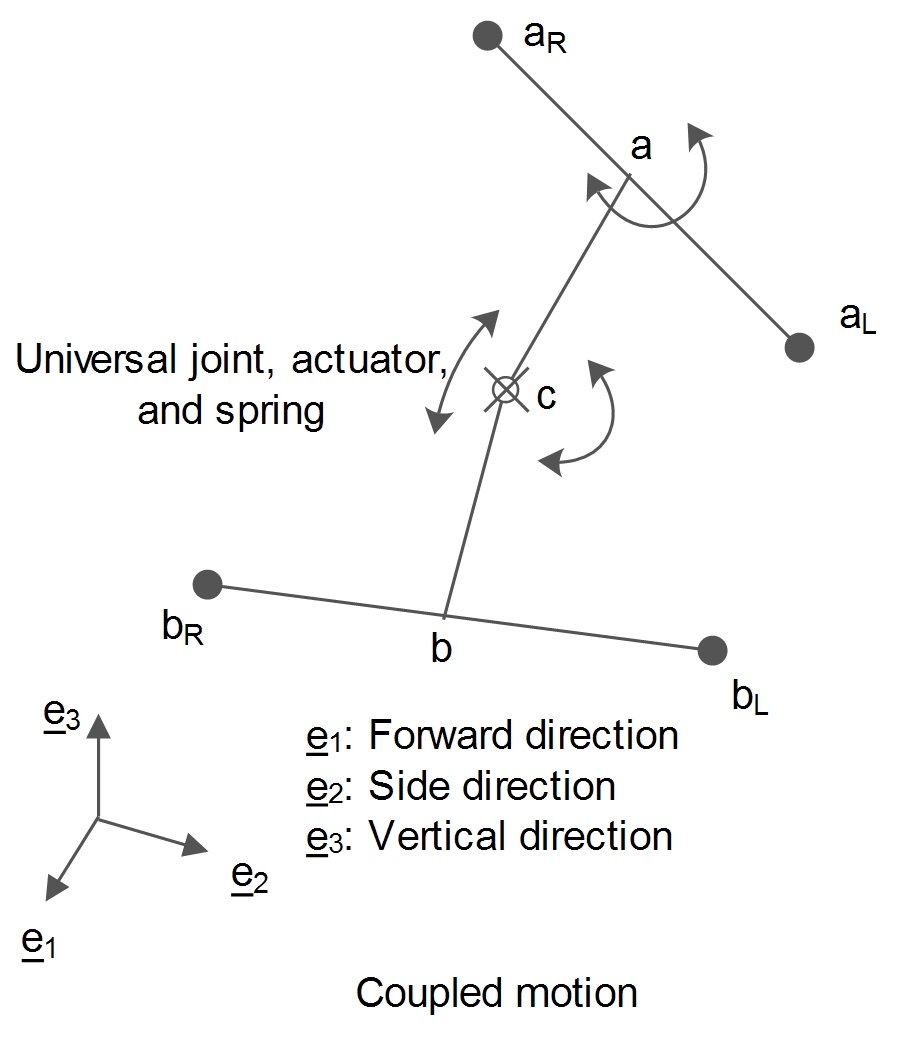
Back Bending Driven Locomotion: Spine Engine
The role of 3D human spine motion in locomotion is still unclear. Some studies suggested that the spine actively move and provide power for walking and running, while the others consider the spine movement as a passive motion for counterbalance. This study examined the function of spine motion in human locomotion analytically and numerically. The results were applied to a robot.
Advisor: Justin Seipel